Dead Reckoning (DR): Sådan estimeres position uden GPS
Dead Reckoning (DR): Lær hvordan position estimeres uden GPS — metoder, fejlkilder og anvendelser for skib, fly og køretøjer i GPS-svage områder.
Dead Reckoning (ofte forkortet DR) er en metode til at estimere en position ved at starte fra et kendt punkt (et fix) og løbende beregne, hvor langt og i hvilken retning man er bevæget sig siden da. Metoden er en grundlæggende del af navigationen og bruges både til sø-, luft- og landnavigation samt i moderne robotik og indendørs navigation, når GNSS-signaler ikke er tilgængelige.
Billedgalleri
3 Billeder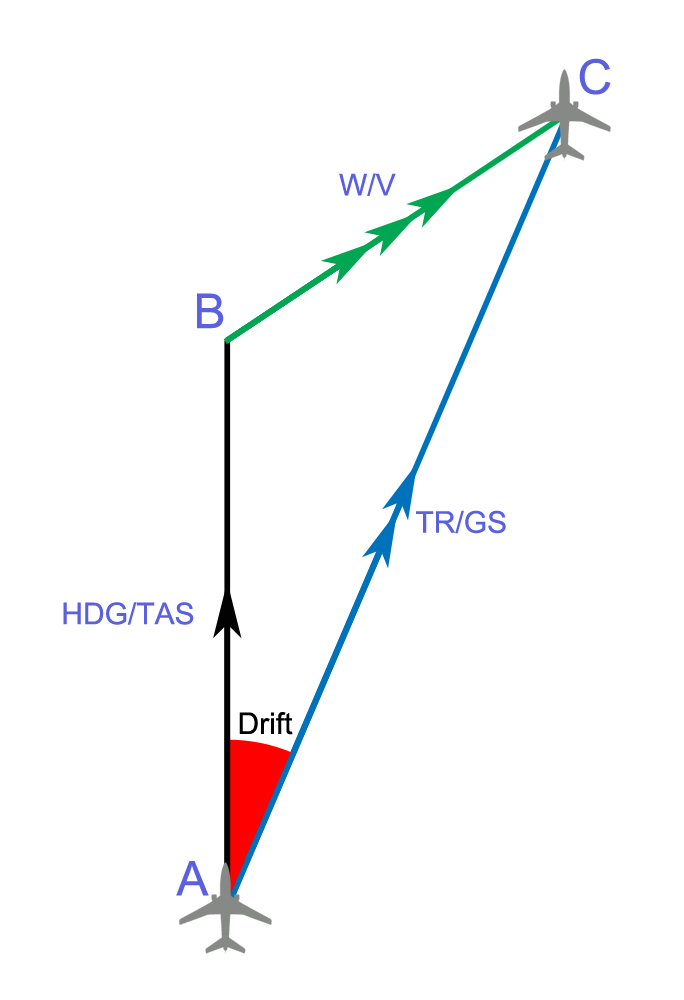


Hvordan Dead Reckoning virker
Grundideen i DR er enkel: hvis du kender din sidste kendte position og kan måle din hastighed og retning over tid, kan du integrere disse bevægelser for at få en estimeret aktuel position. I praksis bygger det på data fra sensorer som:
- Hastighedsmålere / odometri (hjul-encodere i biler eller step-tælling på fodgængere)
- Kompas (magnetisk kompas eller elektronisk kompas i smartphones)
- Gyroskoper og accelerometre (i IMU/INS-systemer til at måle rotationshastighed og acceleration)
- Tryk- eller højdemålere (til at estimere ændringer i højde)
Matematisk kan en simpel to-dimensionel opdatering skrives som: ny_position = gammel_position + hastighed * tidsrum i bevægelsesretningen. I virkeligheden kræves konvertering mellem koordinatsystemer (f.eks. fra hastighed i køretøjets koordinater til verdenskoordinater), og man bruger ofte vektorberegning og numerisk integration.
Fejltyper og fejlophobning
En af de centrale udfordringer ved DR er, at fejl akkumuleres over tid. Typiske fejlkilder er:
- Sensorstøj og måleusikkerhed (fx hjulslip, ukalibrerede encodere)
- Bias i gyroskoper og accelerometre (konstant fejl, der integreres over tid)
- Magnetiske forstyrrelser, der påvirker kompasset
- Fejl i hastighedsestimater (vind for fly/skibe, strøm i vandet)
Resultatet er drift: jo længere tid man kører uden ekstern korrektion, desto større bliver afvigelsen fra den sande position.
Moderne forbedringer og kombination med andre systemer
For at reducere fejl anvendes ofte sensorfusion og statistiske metoder:
- INS + GNSS: Et Inertial Navigation System (IMU + nav-algoritmer) kombineres med Global Positioning System for at få både præcision og kontinuitet. GNSS korrigerer inertial drift, og INS giver position mellem GNSS-opdateringer.
- Kalman-filter og partikel-filter: Anvendes til at kombinere målinger fra flere sensorer og estimere position med usikkerhedsvurdering.
- Map-matching: Kortdata bruges til at 'snappe' estimeret position til vejnettet eller kendte ruter for at reducere fejl i køretøjer.
- Zero-velocity updates (ZUPT): I fodgængere og visse køretøjer kan man detektere øjeblikke uden bevægelse og nulstille dele af INUs fejl.
DR bruges også, når GNSS er utilgængeligt: under vand (hvor radio-satellitsignaler ikke trænger igennem), i tunneler, i tæt bymiljø (urban canyon), i miner under jorden og i militære situationer, hvor GNSS kan være blokeret eller forstyrret. Det er også nyttigt ved midlertidige tab af GNSS på grund af f.eks. signalforstyrrelser eller solaktivitet — derfor undervises DR stadig i navigation.
Historie og praktisk betydning
Dead Reckoning har en lang historie. Søfolk brugte metoden intensivt i æraen før pålidelige tidstagere og global positionsbestemmelse. Efter Christoffer Columbus’s opdagelser benyttede navigatører stjernehimlen til at bestemme breddegrad, men de havde svært ved at bestemme længdegrad uden præcise ure. Derfor var døde opgørelser (DR) afgørende for at krydse oceaner sikkert. En klassisk moderne anvendelse er Richard Byrds polarflyvninger: ved at kombinere dødt pejlemærke og andre navigationsmetoder kunne han i 1926 flyve omkring Nordpolen og vende tilbage til sit udgangspunkt på trods af monoton isø.
DR er også en sikkerhedsbackup: hvis GPS-satellitterne bliver beskadiget af et soludbrud, eller hvis udstyret går tabt eller ødelægges, kan DR give en fortsat positionsestimering i en periode, indtil korrektioner bliver mulige igen.
Praktisk eksempel (forståelse)
Antag, du starter i punktet (0,0) og går i retning nord (heading 0°) med 5 km/t i 2 timer. En simpel DR-opdatering giver: ny position = (0, 0) + 5 km/t * 2 t = (0, 10 km). Hvis du derefter ændrer retning en smule uden præcis kompasmåling, vil små vinkelafvigelser med tiden give en betydelig positionstape.
Tips til brug af Dead Reckoning
- Brug DR som supplement, ikke som eneste kilde, når muligt.
- Kombinér flere sensorer (odometri + IMU + kompas) og anvend et Kalman-filter for bedre resultater.
- Kalibrer sensorer regelmæssigt (hjulstørrelse, gyrobias, kompasforstyrrelser).
- Hold øje med indikatorer for drift (pludselige unøjagtigheder i hastighed eller retning) og søg korrektioner (satellitfix, landkending, visuelle pejlemærker).
Konklusion: Dead Reckoning er en enkel og robust metode til positionsestimering, men den er udsat for fejlophobning. I moderne systemer opnås bedst præstation ved at kombinere DR med GNSS, sensorfusion og kortinformation, så man får både kontinuitet og præcision.

Metode
Dødt regneværk starter fra et kendt punkt (fixpunktet). Derefter skal køretøjets hastighed være kendt. I gamle dage kastede skibe en træstamme ud over siden (bundet til et reb) og talte, hvor lang tid det tog at passere denne træstamme (eller at trække i et reb med knuder og tælle, hvor mange knuder der blev trukket ud på et bestemt tidsrum). Dette ville give skibets hastighed. Kendskab til retningen fra et kompas ville give retningen. Ud fra disse to tal kunne man lave et skøn (et godt gæt) over køretøjets aktuelle position. Vinden skubber dog køretøjet til den ene side (kaldet afdrift), så det skal også måles. Der er også strømme i vandet, selv midt i havet. Med tiden kan dette også give fejl, så der blev lavet kort, som korrigerede for strømmene.
Fly kan nemt måle deres vindhastighed (hvor hurtigt de flyver gennem luften), men ikke hvor hurtigt de bevæger sig over land (kaldet jordhastighed). Modvind, rygvind eller sidevind ændrer jordhastigheden. Hvis flyets højde er kendt, kan man finde frem til jordhastigheden ved at måle, hvor hurtigt flyet flyver forbi et objekt på jorden. (Jo højere man er, jo langsommere synes jorden at bevæge sig). Et vindue på gulvet i flyet kan bruges til at finde jordhastigheden og flyets afvigelse.
Et køretøj på jorden kan også anvende dødt beregning. Normalt behøver de ikke at bekymre sig om vinddrift, og der er ingen strømme på land, så det er nemmere at regne på denne måde.
Spørgsmål og svar
Q: Hvad er Dead Reckoning?
A: Dead Reckoning (eller DR) er en metode til at estimere en position ved hjælp af det sidste kendte punkt, hastighed og bevægelsesretning.
Q: Hvad bruges Dead Reckoning til?
A: Dead Reckoning bruges til at spore et skibs, et flys eller et køretøjs position.
Spørgsmål: Hvorfor bruges dødt opgør ikke så meget nu?
Svar: Der anvendes nu GPS (Global Positioning System) til navigation, hvilket gør Dead Reckoning mindre vigtigt.
Spørgsmål: I hvilke situationer er Dead Reckoning stadig nyttigt?
Svar: Dead Reckoning er nyttigt i områder, hvor GPS ikke er tilgængelig, eller i korte perioder, hvis en GPS-opdatering ikke er blevet opdateret.
Spørgsmål: Hvorfor er det vigtigt at kende til Dead Reckoning?
Svar: Det er vigtigt at kende til Dead Reckoning, hvis GPS-satellitterne bliver beskadiget eller udstyret går tabt, så sejlere og piloter stadig kan navigere.
Spørgsmål: Hvordan kortlagde søfolk verden, efter at Christoffer Columbus kom til den nye verden?
Svar: Sømændene brugte dødt regneværk og stjernerne til at finde deres breddegrad og kortlægge verden.
Spørgsmål: Hvordan blev Richard Byrd den første person, der fløj til Nordpolen?
A: Richard Byrd brugte dødt regneværk til at flyve til Nordpolen i 1926 ved at flyve i 16 timer og vende tilbage til det sted, han forlod, med kun ismarker under sig.
Relaterede artikler
Forfatter
AlegsaOnline.com Dead Reckoning (DR): Sådan estimeres position uden GPS Leandro Alegsa
URL: https://da.alegsaonline.com/art/25956
Kilder
- deadreckoning.com : "Reckoning Aviation Navigation"
- belfortinstrument.com : "How Byrd Navigated to the North Pole"
- ship468.org : "Sea Scout Ship, Navigation"