Inertimoment (vinkelmasse): Definition, formel og enhed
Lær inertimoment (vinkelmasse): klar definition, nøgleformel, enheder og praktiske eksempler for forståelse af rotationsinerti og beregning (kg·m²).
Inertimomentet ( I {\displaystyle I} ), også kaldet "vinkelmasse" (kg-m2), er et roterende legemes inerti i forhold til dets rotation. Det beskriver, hvor svært det er at ændre legemets vinkelhastighed omkring en given rotationsakse.
), også kaldet "vinkelmasse" (kg-m2), er et roterende legemes inerti i forhold til dets rotation. Det beskriver, hvor svært det er at ændre legemets vinkelhastighed omkring en given rotationsakse.
Inertimomentet angiver et roterende legemes modstand mod vinkelacceleration eller -afbremsning. For et sæt punktmasser er inertimomentet summen af hvert enkelt elements masse ganget med kvadratet på dets vinkelrette afstand til rotationsaksen:
I = Σ m_i r_i^2
For et kontinuerligt massefordelt legeme skrives det som et integral:
I = ∫ r^2 dm
Billedgalleri
10 Billeder






Enhed og dimension
SI-enhed: kilogram gange kvadratmeter (kg·m2). Dimensionelt er inertimomentet M L2 (masse gange længde i anden).
Relation til drejemoment og vinkelbevægelse
Inertimomentet spiller samme rolle for rotation som masse gør for translation. For et fast legeme gælder:
- Moment (drejningsmoment): τ = I α, hvor α er vinkelaccelerationen.
- Vinkelmoment (angulært moment): L = I ω, for rotation omkring en principalakse, hvor ω er vinkelhastigheden.
Afhængighed af akse og geometri
Inertimomentet afhænger af både massen og, meget vigtigt, hvordan massen er fordelt i forhold til den valgte rotationsakse. Samme legeme kan derfor have forskellige inertimomenter om forskellige akser.
Parallelakse-sætningen (Huygens–Steiner)
Hvis Icm er inertimomentet om en akse gennem legemets massecenter, så er inertimomentet om en parallel akse en afstand d væk givet ved:
I = Icm + M d^2
hvor M er den samlede masse og d er afstanden mellem de to akser.
Typiske eksempler (om akse gennem centrum og symmetriakser)
- Punktmasse ved radius R: I = m R^2
- Tynd ring eller hul cylinder: I = m R^2
- Fuld cylinder / skive (om symmetriaksen): I = 1/2 m R^2
- Tynd stang, længde L, rotation om centrum (vinkelret på stangen): I = 1/12 m L^2
- Tynd stang, rotation om én ende: I = 1/3 m L^2
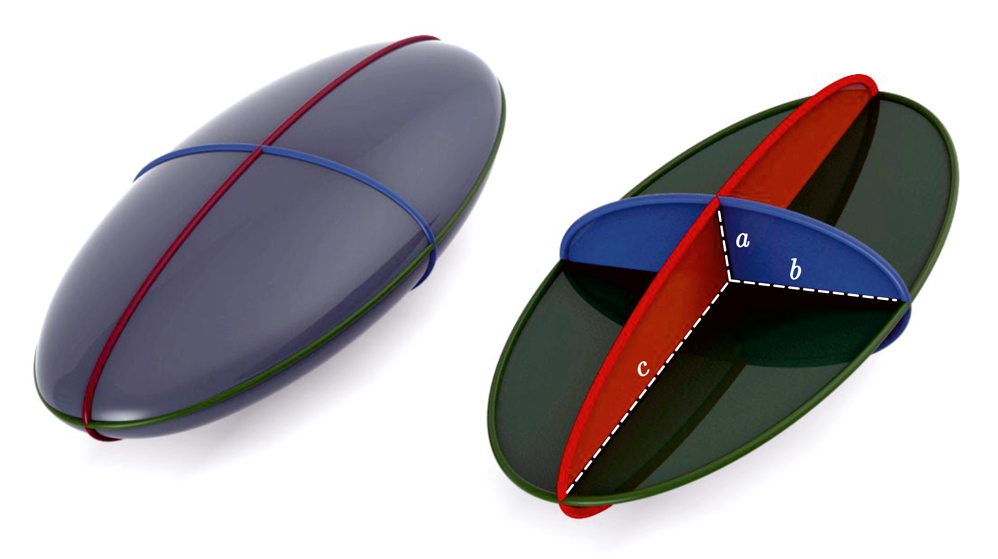
- Rektangulær plade (sider a og b), om centrum vinkelret på pladen: I = 1/12 m (a^2 + b^2)
- Fuld kugle (om diameter): I = 2/5 m R^2
- Tynd kugleskal: I = 2/3 m R^2
Inertitensor og principalmomenter
For generelle 3-dimensionelle legemer kan inertimomentet beskrives ved en 3×3 matrix kaldet inertitensoren. Dens diagonale værdier i et koordinatsystem aligned med principalaksene kaldes principalmomenterne. Disse bestemmer rotationsdynamikken fuldt ud for frie og bundne legemer.
Praktisk betydning og måling
Inertimoment bruges i design og analyse af maskindele, hjul, rotorer og strukturer, hvor rotationsdynamik er vigtig. Det kan beregnes teoretisk fra geometri og massefordeling eller bestemmes eksperimentelt ved at måle vinkelacceleration under et kendt drejningsmoment.
Vigtige pointer
- Inertimomentet er ikke en egenskab ved massen alene: det afhænger af, hvordan massen er fordelt relativt til rotationsaksen.
- Det er altid positivt eller nul.
- Brug parallelakse-sætningen når du kender I om centeret, men skal bruge en forskudt akse.

Relaterede sider
- Vinkelmoment
- Drejningsmoment
Spørgsmål og svar
Q: Hvad er inertimoment?
A: Inertimomentet er et roterende legemes inerti i forhold til dets rotation.
Q: Hvad er et andet navn for inertimoment?
A: Et andet navn for inertimoment er "vinkelmasse".
Q: Hvad er måleenheden for inertimomentet?
A: Måleenheden for inertimoment er kg-m2.
Q: Hvad er betydningen af inertimoment?
A: Inertimomentet repræsenterer et roterende legemes modstandsdygtighed over for vinkelacceleration eller deceleration.
Q: Hvad er ligningen for beregning af inertimomentet?
A: Ligningen til beregning af inertimomentet er I = mr^2, hvor m er massen af det roterende legeme, og r er radius målt vinkelret på rotationsaksen.
Q: Hvordan påvirker massen inertimomentet?
A: Massen af det roterende legeme påvirker inertimomentet direkte, da det er en del af ligningen til beregning af inertimomentet.
Q: Hvordan påvirker radius inertimomentet?
A: Det roterende legemes radius påvirker inertimomentet indirekte, da det ganges med kvadratet på dets værdi i ligningen til beregning af inertimomentet.
Relaterede artikler
Forfatter
AlegsaOnline.com Inertimoment (vinkelmasse): Definition, formel og enhed Leandro Alegsa
URL: https://da.alegsaonline.com/art/65911
Kilder
- books.google.com : Feedback Control Theory for Engineers